

SICK SensorApps Ensure Smooth Docking for Pallets and Dollies
8th April 2020
A 3D camera and SensorApp solution from SICK has enabled rapid, damage-free guidance of automated and driver-assisted high-bay forklifts into pallet pockets, as well as the precise and efficient pick-up of dollies by automated guided vehicles (AGVs).
The SICK Pallet Pocket and SICK Dolly Positioning SensorApps run on SICK’s Visionary T-AP 3D time-of-flight snapshot camera. They promise to cut out delays associated with lining up both automated and manual forklifts to load pallets in high-bay warehouses, as well as positioning AGVs to collect dollies.
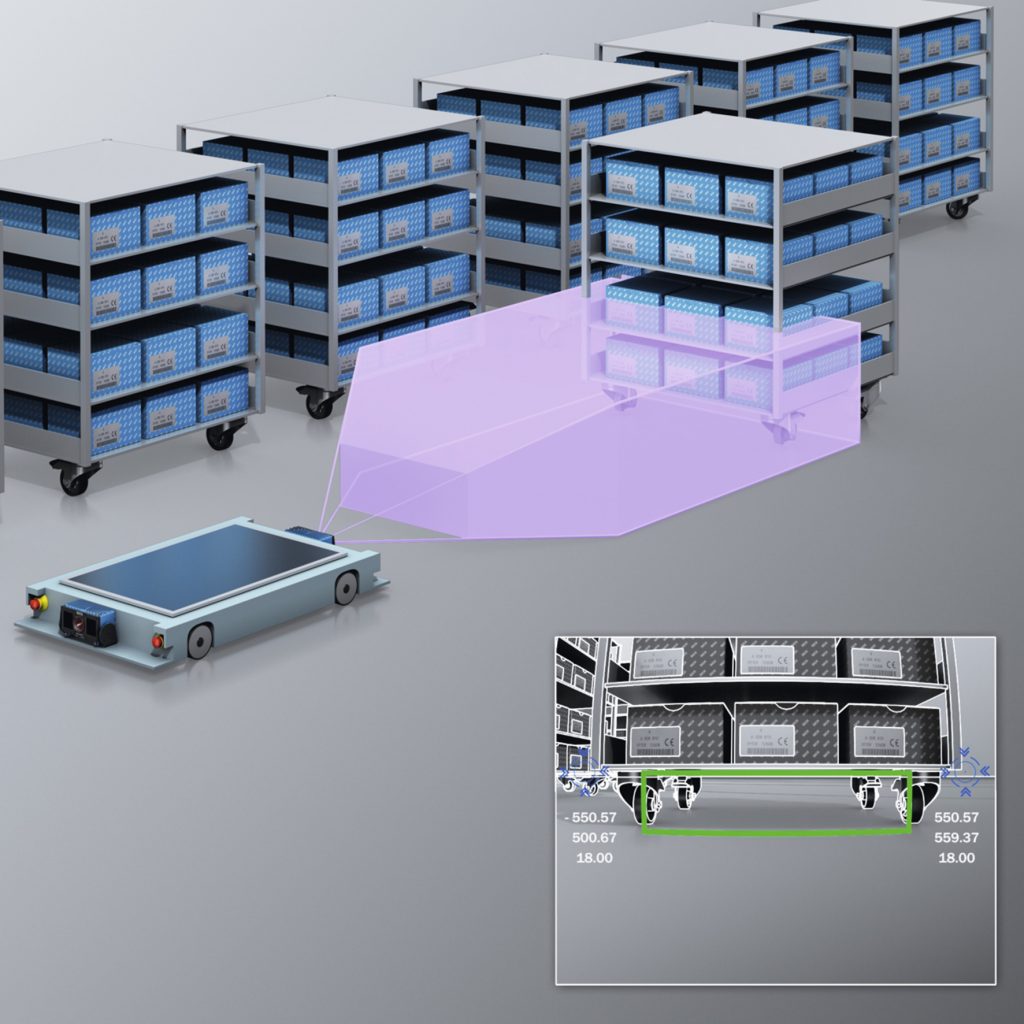
The new Apps, developed in SICK’s AppSpace software environment, work by positioning the camera in front of the pocket or dolly chassis within a working range of 1.5m to 3m. Using a single shot of light, the SICK Visionary T-AP 3D camera captures a 3D image, then pre-processes and evaluates the co-ordinates of the pallet pocket or space under the dolly, before outputting to the vehicle controller. The information can also be sent to a driver display to aid manual forklift operation, particularly useful in high-bay warehouses.
“For autonomous industrial trucks, and in manual high-bay forklift operations, where the driver cannot easily judge where the forks are entering into the pallet pockets, there is a high risk of damage to the forks, pallets, bay or the products themselves. Manually, it’s a trial and error process of aiming for the correct position, which can be time consuming. Automated systems using distance or photoelectric sensors could require significant programming effort and may not be as reliable,” explains Neil Sandhu, SICK’s UK Product Manager for Imaging, Measurement and Ranging.
“To position an AGV to approach and slot neatly under a dolly can be slow and prone to error if relying on work instructions, marks on the floor, or point by point navigation. SICK has developed these new SensorApps to offer a highly reliable, robust new method of guidance which promises to make materials handling and logistics operations faster and more productive.”
The SICK Visionary T-AP is a robust 3D imaging camera that captures high-resolution 3D data with a single shot of light. It builds up a detailed and accurate real-time 3D image of fixed or moving objects with excellent results regardless of angle, surface finish, material or shape of object. It combines different aspects of the light scattered by the object to build up a detailed picture of shape, distance, reflectivity and object depth.
The SICK Pallet Pocket and SICK Dolly Positioning SensorApps are supplied already loaded onto the SICK Visionary T-AP camera and ready for use. As self-contained hardware components, they are easy to fit to existing machinery, as well as being available for use in new industrial truck designs. Setting up the sensor is easy with the SICK SOPASair configuration and diagnostics tool, and it can be easily adjusted to a wide range of pallet and dolly types.
The SICK Visionary T-AP uses Time-of-Flight measurement of a light signal between the device and the target for each point of the image. The CCD/CMOS imager develops a pixel matrix, with each pixel containing depth and intensity information. The camera is designed to capture more than 25,000 distance and intensity values to create real time 3D images at up to 30 frames per second.